Contact Velocity
Contact velocity refers to the relative velocity between two colliding physics bodies at their contact point.
This is calculated by the physics engine by default, but it can be overridden using the modifyContact and contactVelocity attributes in the
contactVelocity
Vector3(m/s)
Default:[0,0,0]
Applied contact velocity offset when colliding (m/s). Only used if modifyContact is true.
Applied contact velocity offset when colliding (m/s). Only used if modifyContact is true.
dynamicFriction
Float
Default:0.5
Dynamic (kinetic) friction coefficient (typically 0..1). If greater than staticFriction, staticFriction is clamped up to match. Effective value is averaged with the other surface.
Dynamic (kinetic) friction coefficient (typically 0..1). If greater than staticFriction, staticFriction is clamped up to match. Effective value is averaged with the other surface.
isTrigger
Boolean
Default:false
Treat associated geometry as a trigger (generates events but no physical response).
Treat associated geometry as a trigger (generates events but no physical response).
modifyContact
Boolean
Default:false
Enable contact modification (applies contactVelocity on collisions).
Enable contact modification (applies contactVelocity on collisions).
restitution
Float
Default:0
Restitution (bounciness) in [0,1]. 0 = no bounce; 1 = perfectly elastic. Effective value is averaged with the other surface.
Restitution (bounciness) in [0,1]. 0 = no bounce; 1 = perfectly elastic. Effective value is averaged with the other surface.
staticFriction
Float
Default:0.5
Static friction coefficient (typically 0..1). 0 feels like ice; higher resists start of motion. Effective value is averaged with the other surface.
Static friction coefficient (typically 0..1). 0 feels like ice; higher resists start of motion. Effective value is averaged with the other surface.
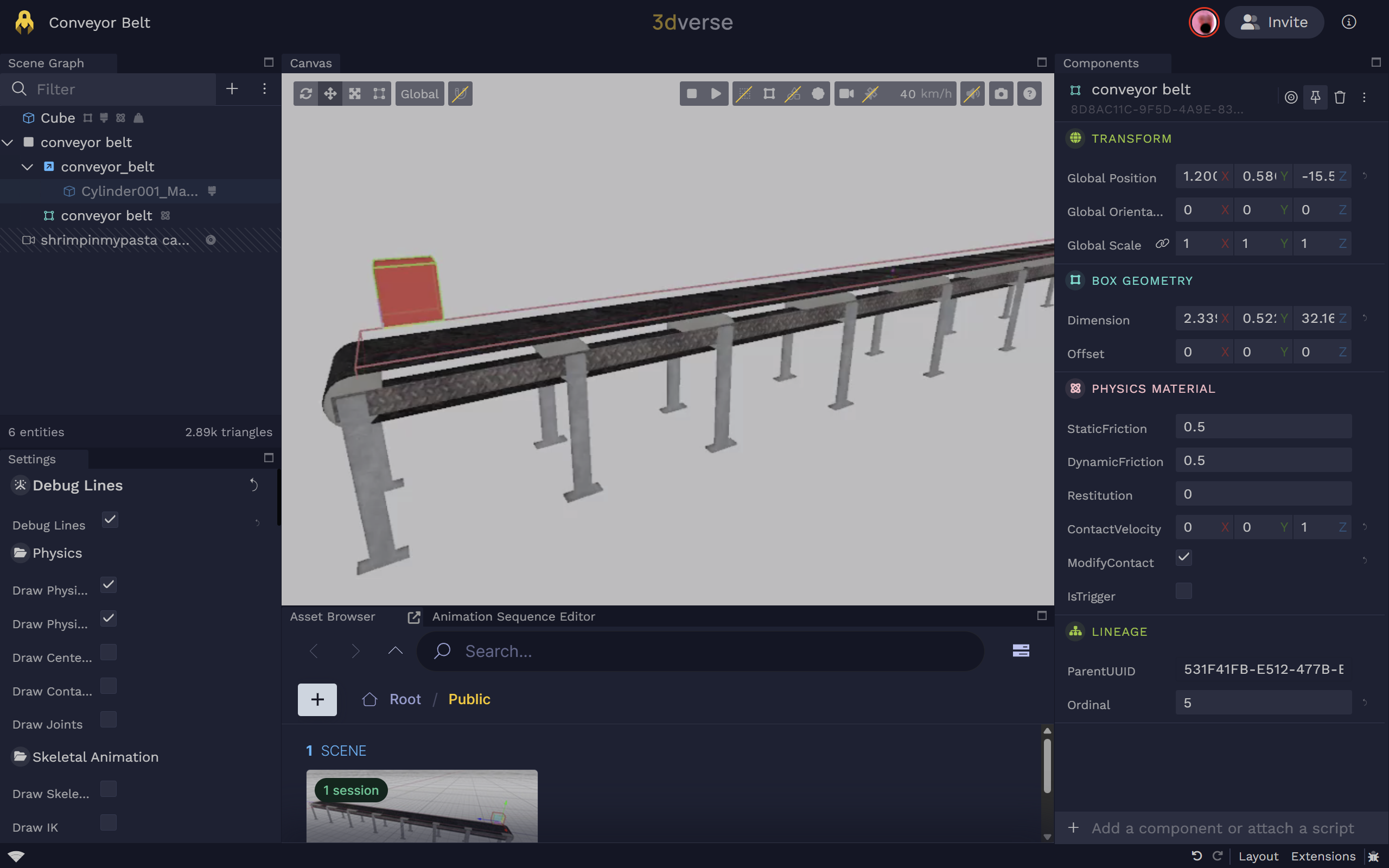
To enable contactVelocity set modifyContact to true.
Then, contactVelocity will be used as the target relative velocity for the contact points between this physics body and all other bodies colliding with it, rather than letting natural physics determine the outcome.
In the case of a conveyor belt, contactVelocity allows objects on the conveyor belt surface to move as if the surface itself is moving at a constant speed, regardless of the objects' natural tendency to come to rest due to friction.